调制是一种非线性电气过程,其中一个信号(载波)的参数被另一个信号(调制、信息)改变。频率、幅度和相位调制广泛用于通信工程。在电力电子和微处理器技术中,脉宽调制很普遍。
什么是 PWM(脉宽调制)
在脉宽调制中,原始信号的幅度、频率和相位保持不变。在信息信号的影响下,矩形脉冲的持续时间(宽度)会发生变化。在英文技术文献中,缩写为 PWM - 脉冲宽度调制。
PWM的工作原理
脉宽调制信号以两种方式形成:
- 模拟;
- 数字的。
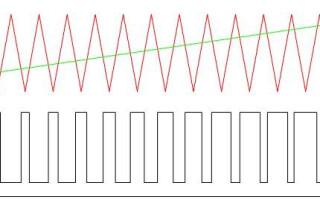
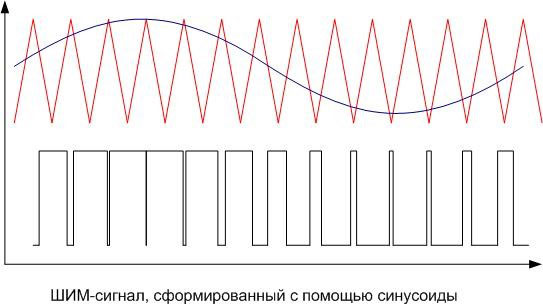
模拟 PWM 信号生成方法在反相端使用锯齿波或三角载波信号 比较器的输入信息信号被送到比较器的同相输入端。如果载波的瞬时电平高于调制信号,则比较器输出为零,如果低于 - 1。输出是一个离散信号,其频率对应于载波三角形或锯齿波的频率,脉冲长度与调制电压电平成正比。
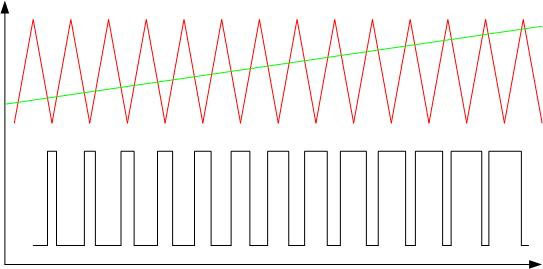
作为示例,示出了通过线性增加信号对三角信号的脉宽调制。输出脉冲的持续时间与输出信号的电平成正比。
模拟 PWM 控制器也可作为现成的集成电路提供,其中包含比较器和载波生成电路。有用于连接外部频率编码器元件和提供信息信号的输入。从输出中获取控制强大外部开关的信号。还有用于反馈的输入——它们是维持设定的调节参数所必需的。例如,TL494 芯片。对于消费者功率相对较低的情况,可以使用带有内置按键的 PWM 控制器。对于高达 3 安培的电流,设计了 LM2596 芯片的内部开关。
使用专用芯片或微处理器执行数字方法。脉冲长度由内部程序控制。许多微控制器,包括流行的 PIC 和 AVR,都有一个用于硬件 PWM 实现的板载模块。要获得 PWM 信号,需要激活模块并设置其运行参数。如果没有这样的模块,可以通过纯软件的方式来组织PWM,并不难。这种方法由于输出的灵活使用提供了更多的可能性和更多的自由,但涉及到控制器的更多资源。
PWM信号特性
PWM信号的重要特征是:
- 幅度(U);
- 频率(f);
- 占空比 (S) 或填充因子 D。
根据负载设置以伏特为单位的幅度。它必须提供消费者的标称电源电压。
脉宽调制信号的频率从以下考虑中选择:
- 频率越高,调节精度越高。
- 频率不能低于设备的响应时间,由PWM控制,否则调节参数会出现明显的脉动。
- 频率越高,开关损耗越大。这是因为密钥的切换时间是有限的。在锁存状态下,整个电源电压都落在关键元件上,但几乎没有电流。在开路状态下,满载电流流过按键,但电压降很小,因为通过电阻为几欧姆。在这两种情况下,功耗都可以忽略不计。从一种状态到另一种状态的转换是快速的,但不是瞬时的。在开合过程中,部分开路的元件上会产生很大的电压降,同时有很大的电流流过它。此时功耗达到很高的值。这段时间很短,关键还没有来得及大幅度热身。但是随着频率的增加,单位时间内这样的时间间隔越来越多,热损失也越来越大。因此,重要的是使用快速作用的元素来构建键。
- 控制时 马达的 频率必须超出人可听到的范围 - 25 kHz 及以上。因为在较低的 PWM 频率下,会出现令人不快的啸叫。
这些要求往往相互冲突,因此在某些情况下频率的选择是为了寻求折衷方案。
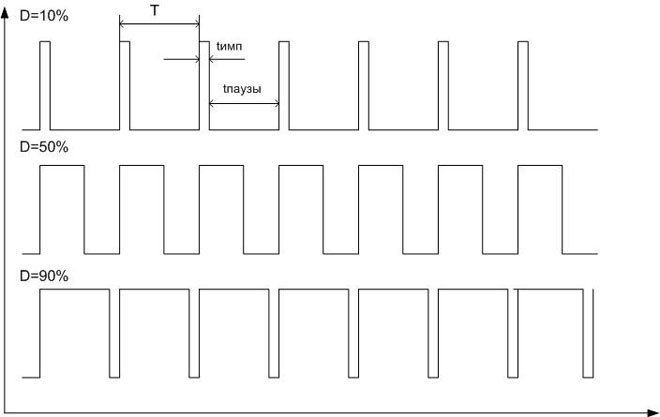
调制幅度由占空比表征。由于脉冲重复率是恒定的,周期持续时间也是恒定的(T=1/f)。一个周期由一个脉冲和一个暂停组成,它们的持续时间分别为 t小鬼 和T暂停, 其中 t小鬼+t暂停=Т.比率是脉冲持续时间与周期的比率 - S=t小鬼/T。但在实践中,使用倒数更方便 - 填充因子:D=1/S=T/t小鬼。.将填充因子表示为百分比更为方便。
PWM和PWM有什么区别
在国外的技术文献中,并没有脉宽调制和脉宽控制(PWM)之分。俄罗斯专家正试图区分这些概念。实际上,PWM是一种调制方式,即载波信号在另一种调制信号的作用下发生变化。载波信号充当信息的载体,调制信号设置此信息。而脉宽控制是通过PWM来调节负载模式。
PWM的原因及应用
脉宽调制的原理用于 用于强大感应电机的速度控制器.在这种情况下,由小功率正弦波发生器形成频率可调(单相或三相)的调制信号,并以模拟方式叠加在载波上。输出是一个 PWM 信号,它被馈送到电源需求键。然后,您可以将得到的脉冲序列通过一个低通滤波器,例如一个简单的 RC 链,并隔离原始正弦波。或者您可以不使用它 - 由于电机的惯性,过滤会自然发生。显然,载波频率越高,输出信号的形状就越接近原始正弦波。
一个自然的问题出现了——为什么你不能一次放大振荡器信号,例如, 使用大功率晶体管?因为以线性模式运行的调节元件将在负载和开关之间重新分配功率。这意味着在关键元素上浪费了大量的能量。另一方面,如果一个强大的调节元件在按键模式下工作(三极管、三端双向可控硅开关、RGBT 晶体管),则功率会随时间分布。损失会低得多,效率会高得多。
在数字技术中,脉冲宽度控制没有特殊的替代方法。那里的信号幅度是恒定的,改变电压和电流的唯一方法是调制脉宽载波,然后对其进行平均。因此,PWM被用来调节那些可以平均脉冲信号的物体的电压和电流。平均以不同的方式发生:
- 通过负载惯量。因此,热电加热器和白炽灯的热惯性允许控制对象在脉冲之间的暂停中不会显着冷却。
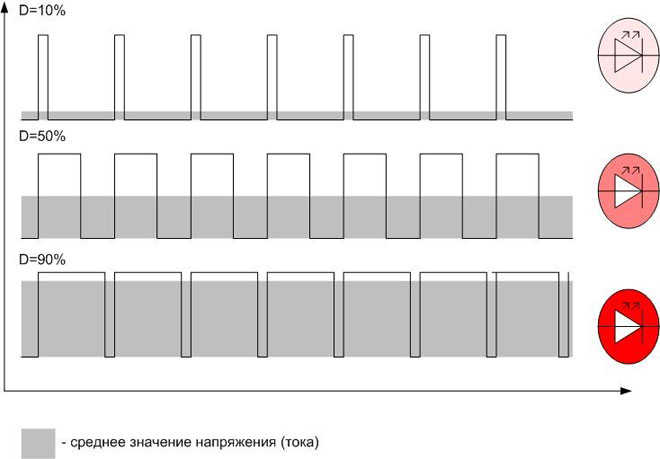
- 由于感知的惯性。 LED 有时间从一个脉冲变为另一个脉冲,但人眼并没有注意到这一点,而是将其视为具有不同强度的恒定发光。 LED显示器的亮度控制就是基于这个原理。但是仍然存在频率为数百赫兹的难以察觉的眨眼,并导致眼睛疲劳。
- 由于机械惯性。此属性用于控制直流集电极电机。如果控制频率选择正确,电机没有时间在死区时间暂停中失速。
因此,PWM 用于电压或电流的平均值起决定性作用的地方。除上述常见情况外,PWM 方法还调节焊机和电池充电器等的平均电流。
如果自然平均是不可能的,在许多情况下,这个角色可以由已经提到的低通滤波器来承担(低通滤波器) 以 RC 链的形式。出于实际目的,这已经足够了,但应该理解的是,不可能使用 LPF 将原始信号与 PWM 隔离而不失真。毕竟,PWM 频谱包含无限多的谐波,不可避免地会进入滤波器带宽。因此,不要对恢复的正弦曲线的形状抱有任何幻想。
RGB LED 的 PWM 控制非常有效且高效。该器件具有三个 p-n 结 - 红色、蓝色、绿色。通过分别改变每个通道的亮度,您可以获得几乎任何颜色的 LED 发光(纯白色除外)。使用 PWM 创造光效的可能性是无穷无尽的。
数字脉宽调制信号最常见的应用是控制流过负载的平均电流或电压。但是这种调制类型的非标准使用也是可能的。这一切都取决于设计师的想象力。
相关文章: